The development of miniature solutions for autonomous vehicles can be done for several purposes. First of all, this poses a challenge in various ways: miniaturization of mechanics, electronics, power supply. Construction of miniature vehicles poses special challenges for the development of software and hardware which lead to optimization of current technologies. Especially machine learning methods (e.g. deep learning) are difficult to apply in miniature vehicles due to the vast computational needs of ML methods.
Now, going one step further is what we call miniature autonomy: When heading for a miniaturization down to very small sizes (e.g., scale 1:87 or smaller) new solutions need to be found. The old approaches are no longer applicable but new solutions, new algorithms need to arise.
As soon as (partially) autonomous miniature vehicles are available, they open a completely new test option for developments in autonomous driving. Model vehicles offer a compromise between real world tests and abstract simulations. The apparent difference between sensor data of real environments and model environments is not relevant. Development of sensors and testing is done independently and are often not critical. The error which appear in miniature scale are one level higher, as in the first Tesla accident (one sensor detects an obstacle, another one doesn´t) or in the Uber accident (Volvo sensors supposedly have sensed the person but the corresponding reaction / driver assistance was switched off).
The focus of miniature tests can be on edge cases, critical driving and traffic situations and, for example, the multiple repetition of actually uncritical situations (the collection of high test kilometers in everyday situations).
Last but not least, there is the test case in which an autonomous system continues learning during operation. This is currently avoided and has to be tested extensively outside of public roads - for example in a miniature environment.
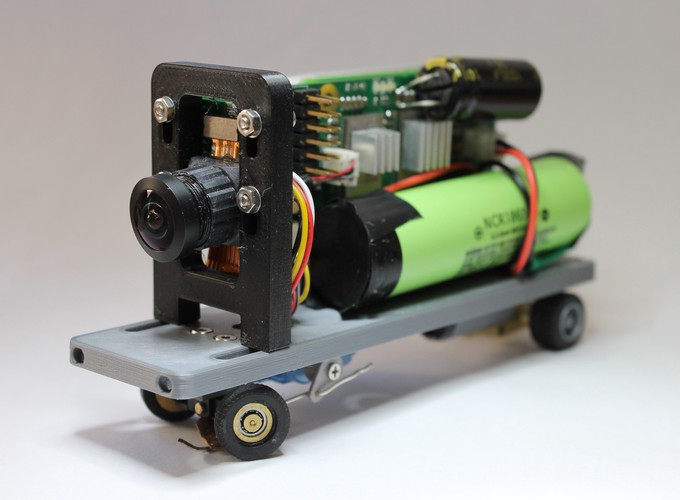
Miniature Wonderland in Hamburg drive model cars based on the technology of the FALLER Car-System. Within the framework of final theses and projects at the Department of Computer Science of the HAW Hamburg, it is investigated whether real autonomous driving - without contact wire as in the FALLER system - is possible on the model roads on a scale of 1:87. To this end, model vehicles were developed and built on a scale of 1:63 and 1:87.
Videos