
Carolo Cup
The Carolo Cup is student competition at TU Braunschweig on construction of autonomous model cars.
For many years - starting in 2006 - teams from HAW Hamburg have participated in this competition. Here you find an overview about the miniature cars, that were developed for the Carolo Cup and the results. For further details have a look at the different platforms presented.
Overview
2020
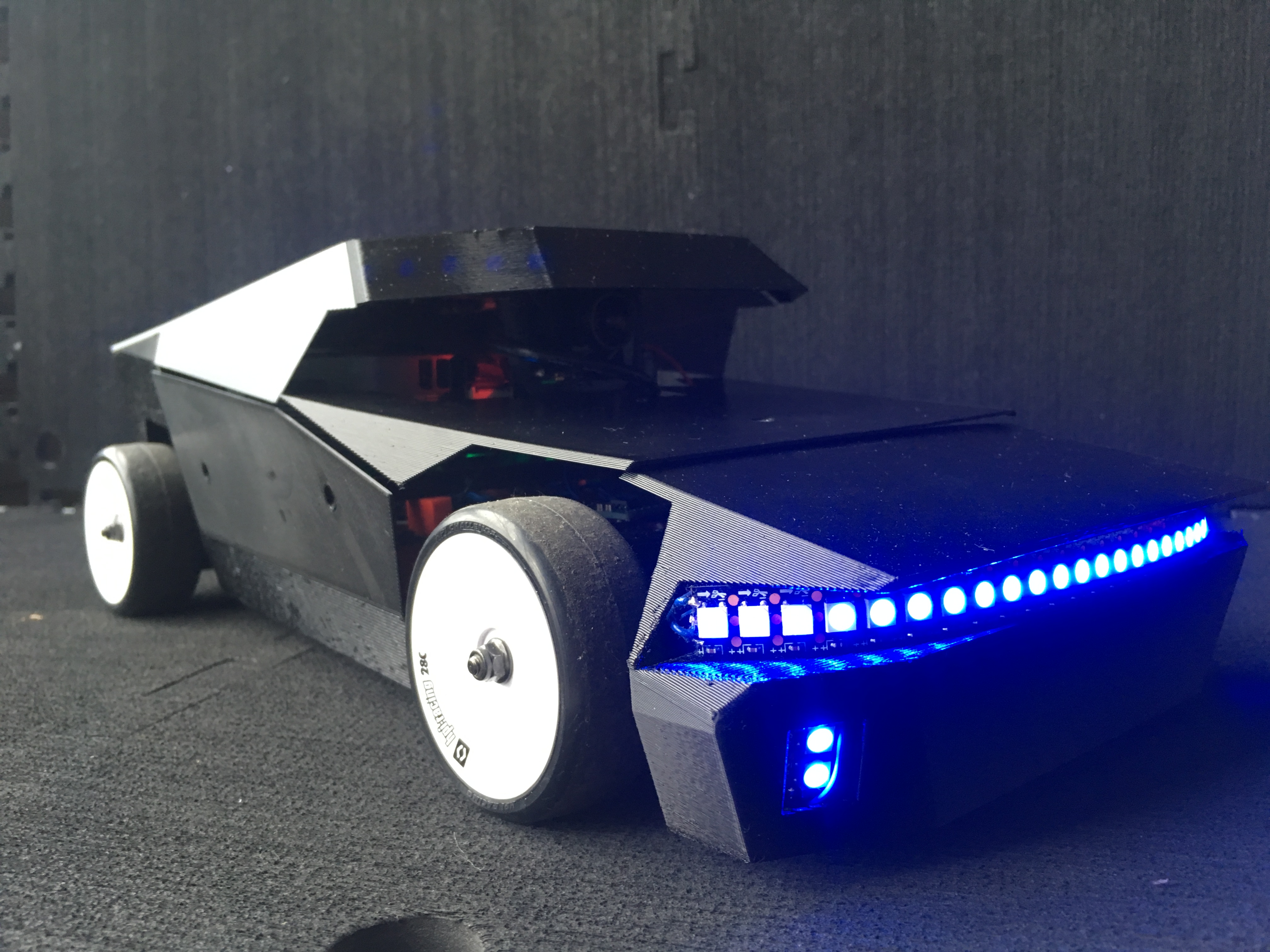
TeamWorstCase placed first in the Basic Cup.
While ensuring to have a reasonable realisitic bodywork, TeamWorstCase approaced the design differently than the years before. Instead of attaching the camera on a tower with the maximum size, the camera was mounted behind the windshield like it is done in real modern cars.
2019
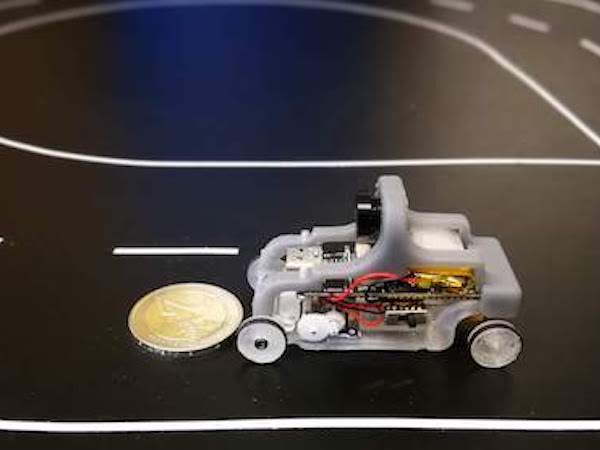
Even though the car from 2019 did not participate in the Carolo Cup it was designed by its standards. The two reseach goals were on the one hand to let the car drive autonomously in Miniatur Wunderland in Hamburg and on the other hand to collect image data for machine learning methods.
Pictures
2018
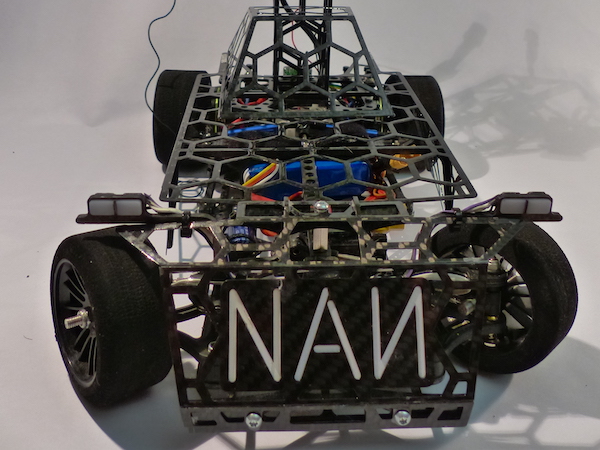
This year two teams - Team NaN and TeamWorstCase participated in the Carolo Cup. TeamWorstCase came in 12. place in the Basic Cup and Team NaN placed 5..
2017
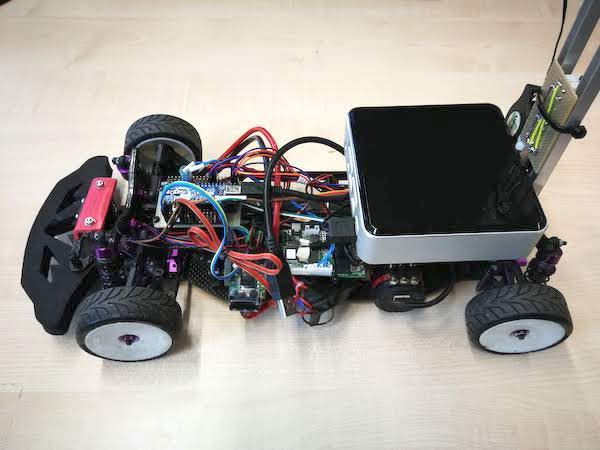
Team NaN came in 3. place this year. Here you can get an impression of the performance in 2017.