Description
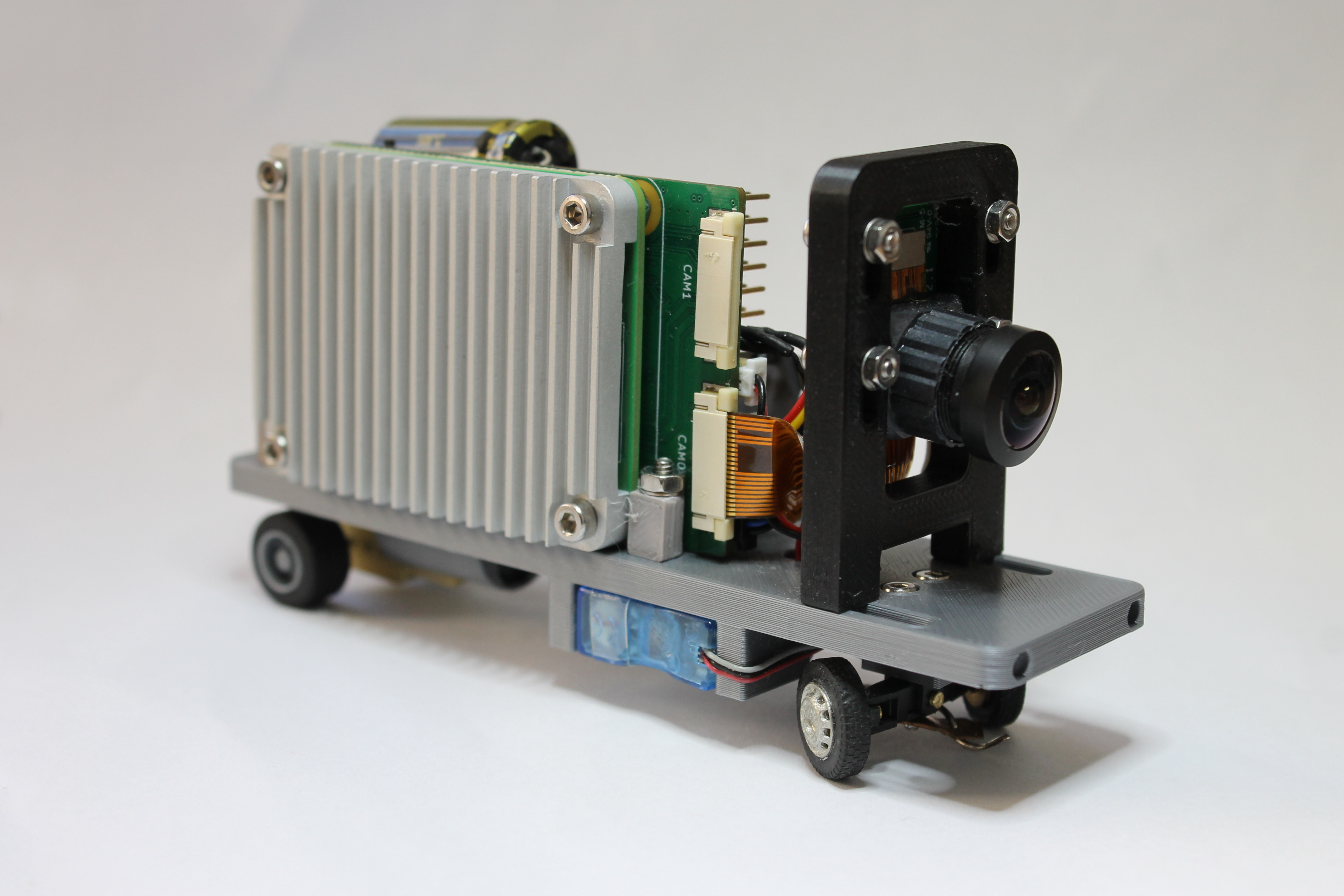
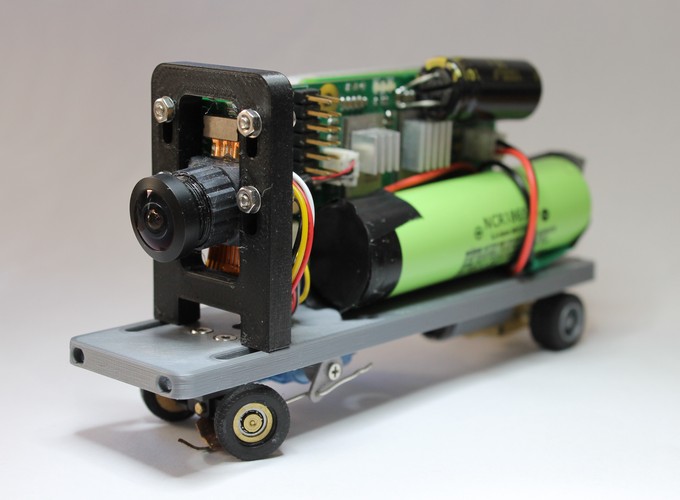
The TinyCar CM4 is the latest development of H0-scale (1:87) vehicles for autonomous driving in a miniature world. It is built around a powerful Raspberry Pi Compute Module 4 (CM4) as the main computing unit, with a custom PCB providing up to 8 TOPS of machine learning power using two Coral TPUs. Up to two cameras can be attached, of which one front facing ultra wide angle high resolution camera is currently used. An onboard IMU (BNO055) and an absolute-encoder on the rear axle provide odometry data to supplement localization information from an onboard Ultra-Wideband (UWB) indoor positioning system. A 3500 mAh 18650 Li-Ion battery provides power for a runtime of up to 3 hours. All parts attach to a 3D printed chassis.
All computation tasks are run locally on the vehicle within a ROS stack, making the vehicle truly autonomous and not reliant on any external hardware. With the available local machine learning accelerators, even complex tasks like image segmentation are computed directly on the vehicle.
The TinyCar CM4 is intended to be used in our own Mikro-Wunderland as well as Hamburgs Miniatur Wunderland. The small scale makes it an ideal vehicle for autonomous driving education and research, since it comes with no risks involved to researchers and it?s environment.
Research areas cover anything from vision based machine learning over path planning, vehicle control theory and trajectory prediction to multi-agent behaviour. We hope to see many TinyCars on the streets of the Miniatur Wunderland some day, proving that fully autonomous cities are possible, even at a small scale.
| Technical details | |
|---|---|
| Scale | 1:87 |
| Length | 115mm |
| Width | 30mm |
| Power Supply | 3500mAh 18650 Cell |
| Drive Train | 7mm brushed DC motor |
| Steering | 2.5g micro servo |
| Communication | 2.4/5GHz WiFi, Bluetooth, UWB |
| CPU | 4 Core BCM2711 (up to 2 GHz) |
| Accelerators | 2 Coral TPUs with 4 TOPS each |
| Sensors | IMU, absolute wheel encoder, cameras, optional distance sensors |
| Camera | IMX219 with 160 degree lens |
Pictures