Description
The Husky is a UGV (Unmanned Ground Vehicle) and part of the TIQ project.
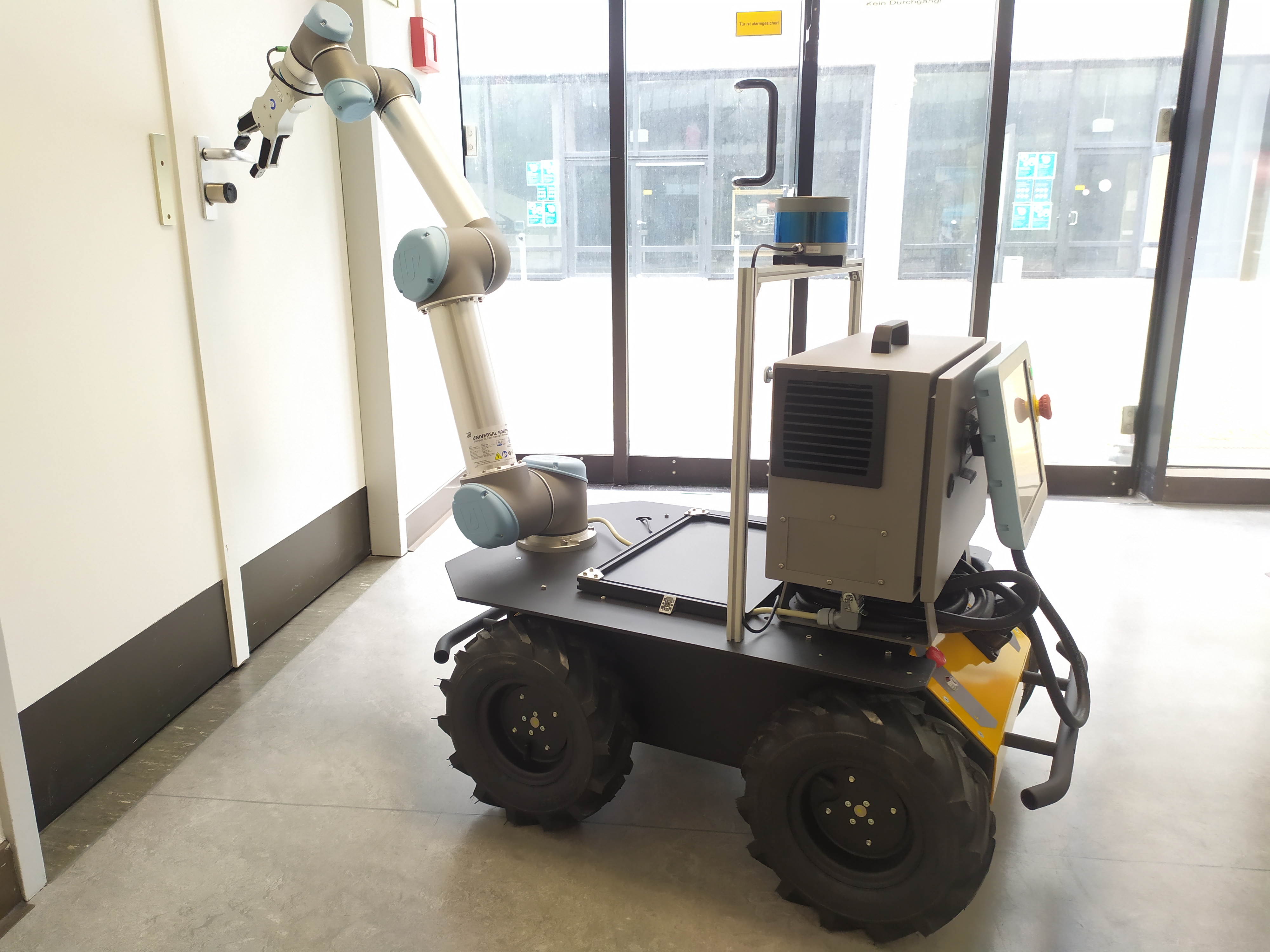
The first development goal is, that the Husky is able to take the elevator autonomously. To interact with the environment a grip arm (UR5) is installed, which is combined with RG6 flexible 2 finger robot gripper with wide stroke.
Another short term goals is, that the Husky can navigate around the campus autonomously and fulfill minor tasks like dropping off items at certain positions.
Therefore two intel realsense D435 depth-sensing cameras are built into the Husky, which allow 3D-perception. In addition to that there is a robosense 3D-laser-scanner RD-LiDAR-16 installed, as well as a UM7 orientation sensor and the GPS U-Blox 7.
The software framework ROS (Robot Operation System) is used in combination with C++ and Python.
Pictures