Description
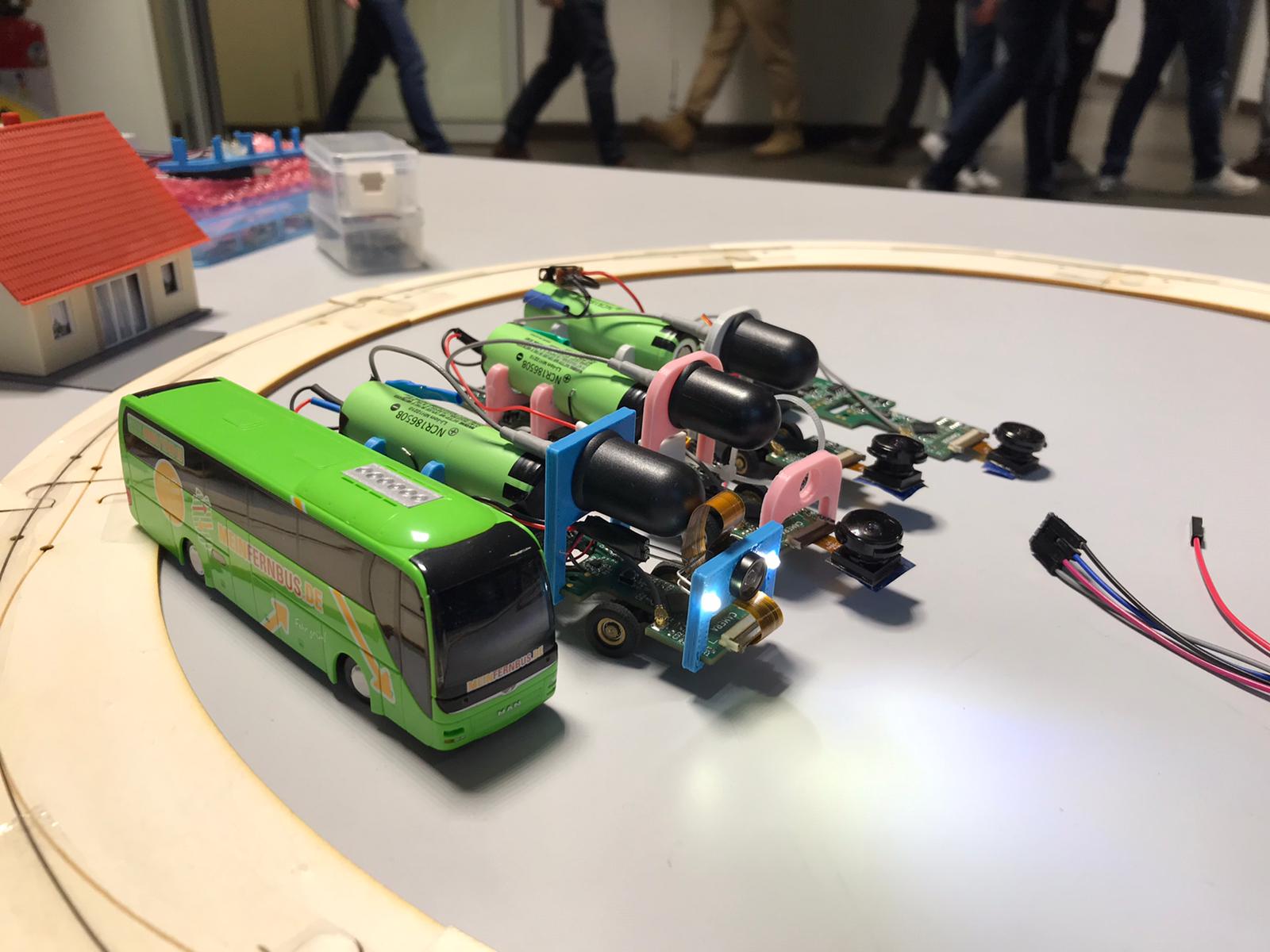
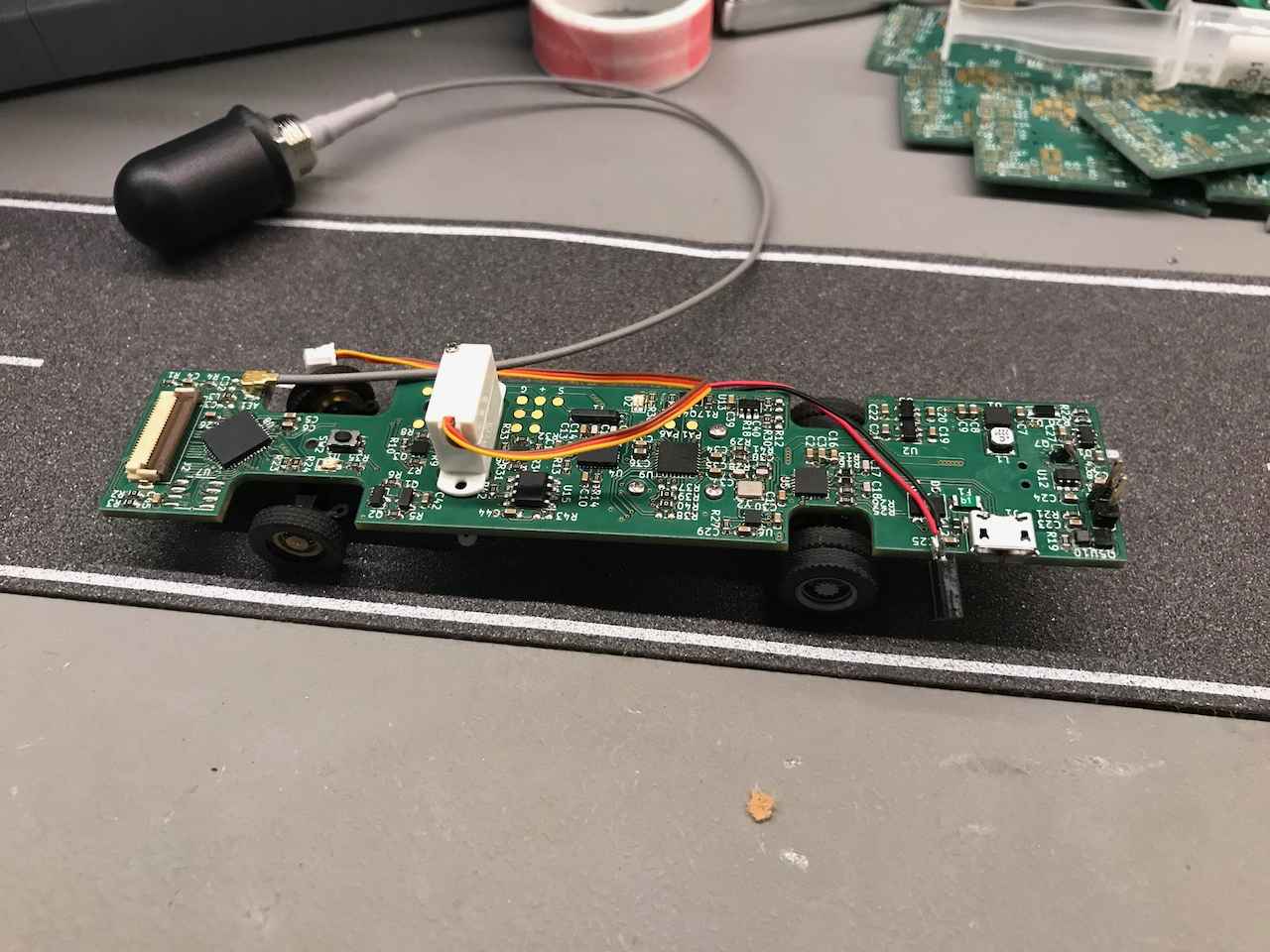
The H0-scale bus platform is built upon a custom PCB (printed circuit board) chassis, optionally fitting a Faller tour-bus shell. It features an ESP32 as it’s main processor, as well as an STM32F3 microcontroller for peripheral control purposes. The platform is designed to transmit a camera image, including sensor data, to a more powerful host computer, which then transmits control signals back. Sensors fitted on the vehicle include a Bosch BNO055 IMU, an optical wheel encoder located at the rear wheels, composed of an IR LED and photodiode, a steering angle sensor and a front camera. The steering rack, based on readily available parts, allows for either following a wire embedded in the underlying road using a magnet, or being controlled by a nano-servo. A 3-dimensional hall-sensor located on top of the steering rack reads back the current steering angle. The 3400mAh 18650 LiPo cell located on the back of the vehicle allows for a total lifetime of up to 10 hours on a single charge, making it suitable for long data collection tours. External parts like the battery, antenna, camera and motor are attached to the PCB using 3D printed clips.
The data collected by this vehicle can be used for training machine learning algorithms like reinforcement learning, which then in turn can control the vehicle remotely. It’s small size makes it ideal for navigating through H0-scale worlds like the Miniature Wunderland Hamburg.
Technical details
| Feature | Details |
|---|---|
| Scale | 1:87 |
| Length | 130mm |
| Width | 25mm |
| Power Supply | 18650 LiPo Cell |
| Drive Train | 7mm brushed DC motor |
| Steering | 1.7g nano servo |
| Communication | 2.4GHz Wifi, Bluetooth |
| MCU | ESP32, STM32 |
| Sensors | IMU, wheel encoder, steering angle, camera |
| Camera | OV2640 with wide angle lens |
Pictures