
Systembeschreibung
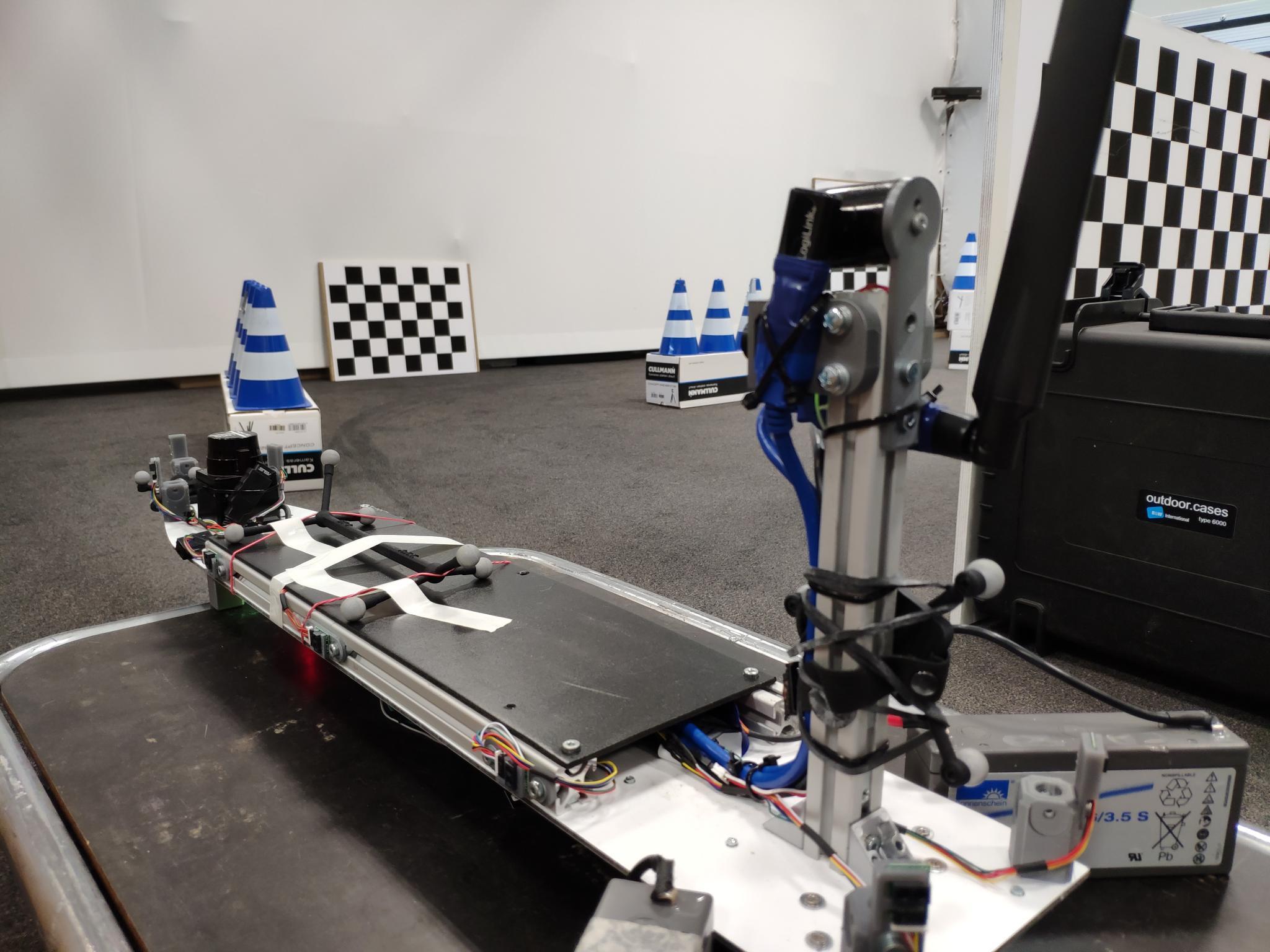
Beim Modellschiff nHAWigatora handelt es sich um ein Miniaturschiff im Maßstab 1:100. Dieser ist ausgestattet mit Aktorik, zum Manövrieren und Sensorik, um die Umwelt zu erfassen. Eingesetzt und getestet wird die nHAWigatora im Miniatur Wunderland in der Hamburger Speicherstadt. Das Wunderland verfügt über ein 30.000 Liter Echtwasserbecken, in dem die nHAWigatora regelmäßig ablegt und die Gegend erkundet.
Technische Details
| Merkmal | Beschreibung |
|---|---|
| Größe | 100 cm x 20 cm x 37 cm |
| Gewicht | 4,0 kg |
| Geschwindigkeit | 3 km/h |
| Stromversorgung | 12V Bleiakku |
| Antrieb | 2x Elektromotoren 12 V (Propeller, Querstrahlsteueranlage) |
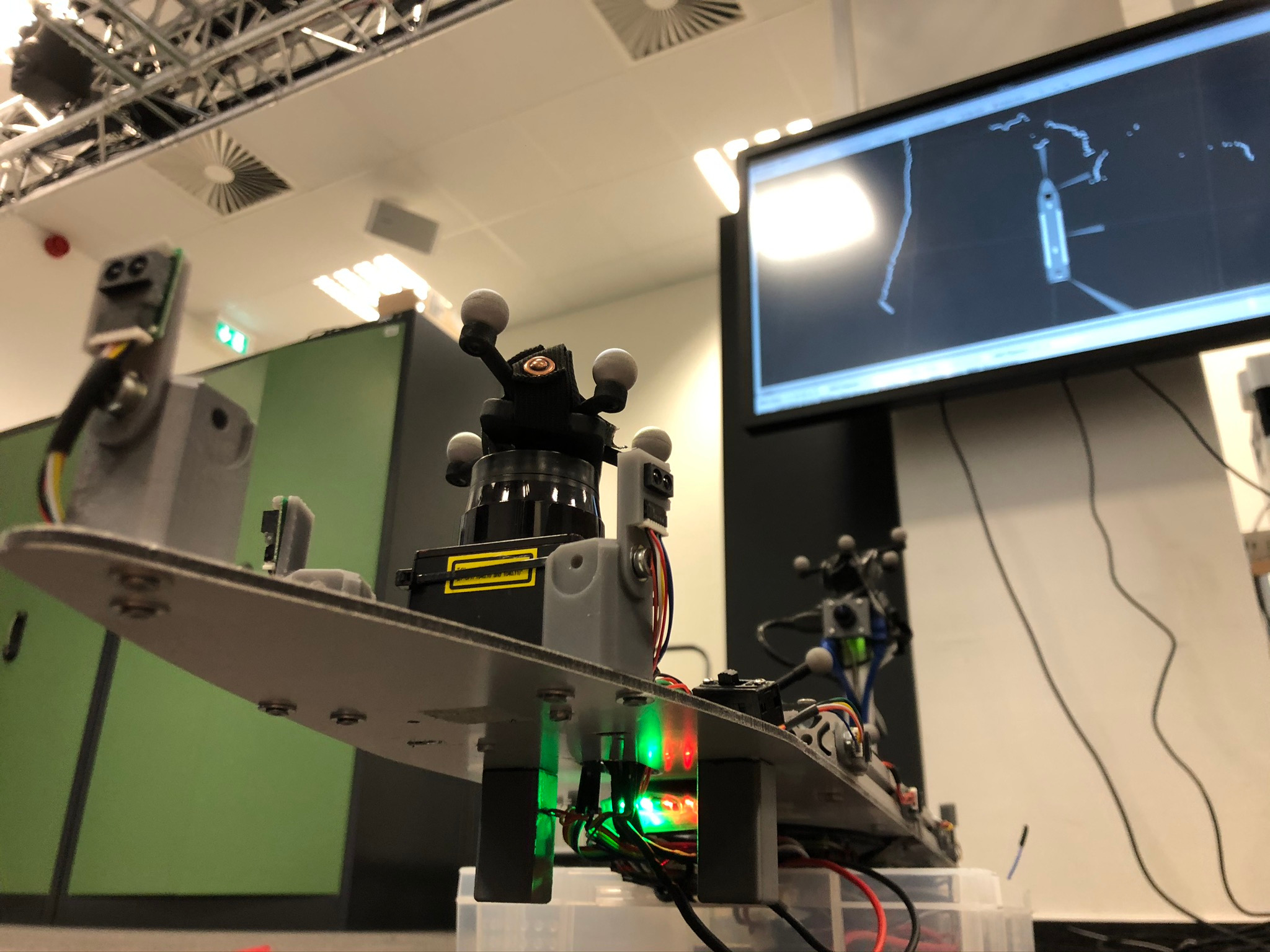
| Sensoren | 1x Hokuyo URG-04LX-UG01 1x InveSense IMU MPU-9250 11x Sharp GP2Y0E03 1x Basler Dart daA1920-30uc |
| Kommunikation | Wifi, Bluetooth |
| Rechenleistung | RaspberryPi 4, RaspberryPi 3b+ Arduino Micro (Regelung der Motoren) |
Auf dem Schiff kommt das Robotik-Framework ROS zum Einsatz. Im derzeit manuellen Betrieb empfängt einer der RaspberryPIs via Bluetooth Steuerbefehle von einen handelsüblichen Spielecontroller. Der PI steuert dann die Regelungstechnik an, in welcher ein Arduino Micro die Drehzahl der Motoren regelt. Neben der Verarbeitung der Sensordaten auf den PIs können die Daten per Wifi in Echtzeit empfangen und ausgewertet werden. Für Sensortests an Land kann der Aufbau mit der Sensorik aus dem Schiffsrumpf entfernt werden.
Bilder



Videos
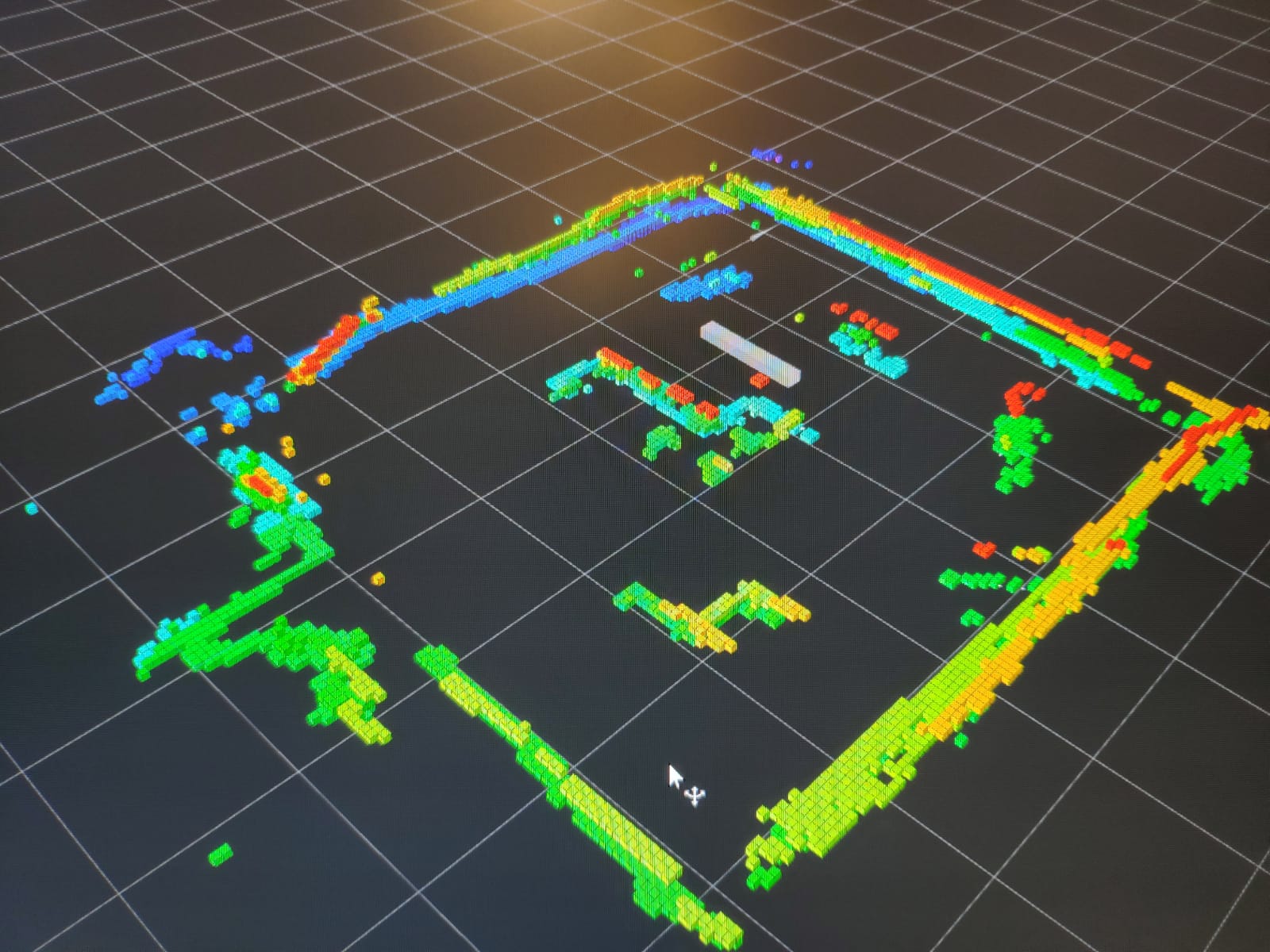
Eine Testfahrt im Miniaturwunderland. Die nHAWigatora wird hier manuell gesteuert und zeichnet die Sensordaten zur späteren Verarbeitung auf:
Dynamisch auftauchende Hindernisse sind zu unterscheiden von statischen Begrenzungen des Beckens: Im Kanal können alle Sensoren Land erkennen:Links
- Hokuyo URG-04LX-UG01 Datenblatt
- InveSense IMU MPU-9250 Datenblatt
- Sharp GP2Y0E03 Datenblatt
- Basler Dart daA1920-30uc Datenblatt
- ROS
- Miniatur Wunderland