Platforms
autonomous vehicles and research platforms

Robocar
iPhone based autonomous vehicle for the Carolo Cup competition
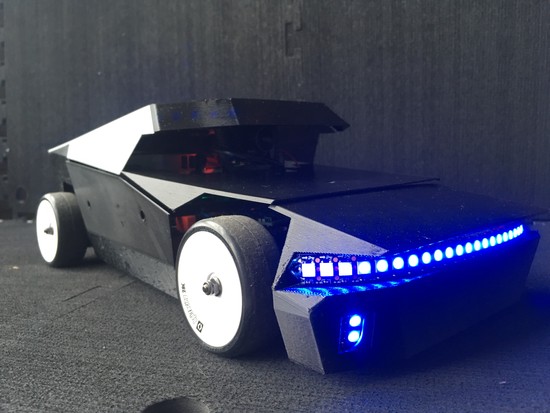
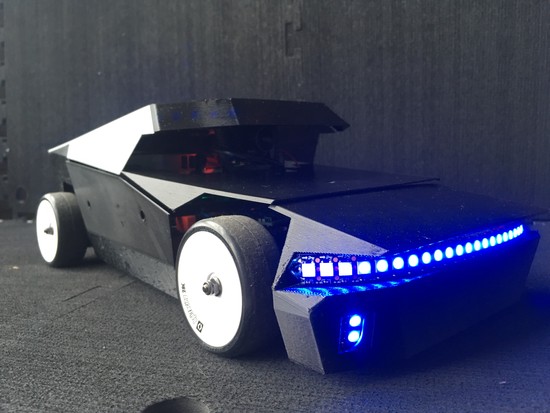
TinyCar CM4
H0-scale model for miniature autonomy

Husky
autonomous vehicle for the TIQ project

H0-scale street platform
H0-scale model for testing miniature automatives and collecting data
Carolo Cup 2020
Competition vehicle for carolo cup 2020 by TeamWorstCase

Miniature H0-Bus
H0-scale vehicle for reinforcement learning

nHAWigatora miniature ship
autonomous ship for research on sensor data integration
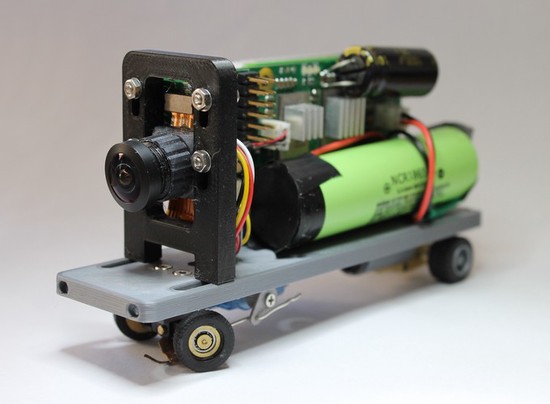
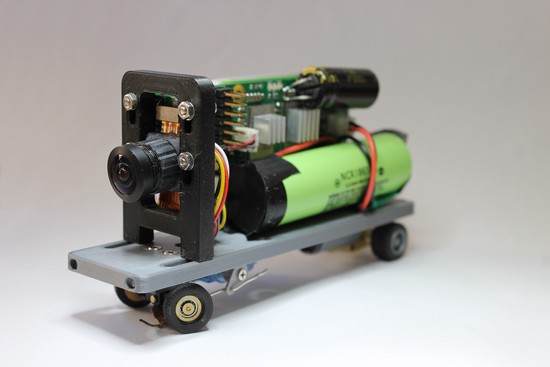
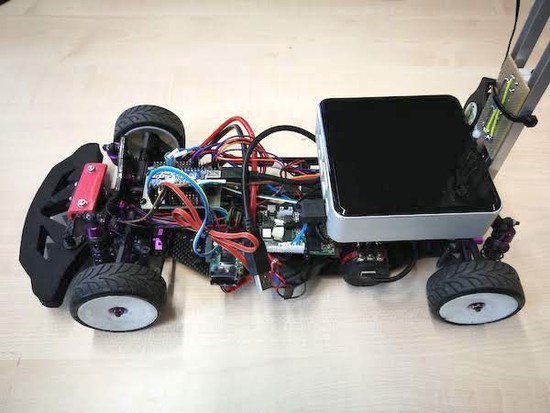
Miniature Car
ESP32 processor based autonomous vehicle using image data from micro cam for navigation
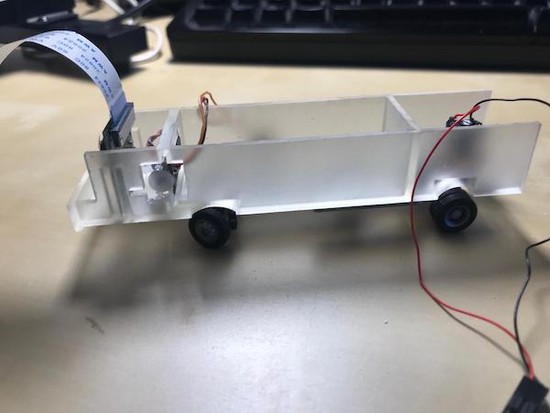
Miniature Truck
Machine learning (ML) on a miniature truck with FPGA-based ML acceleration
Carolo Cup 2018
competition vehicle for carolo cup 2018 by TeamWorstCase
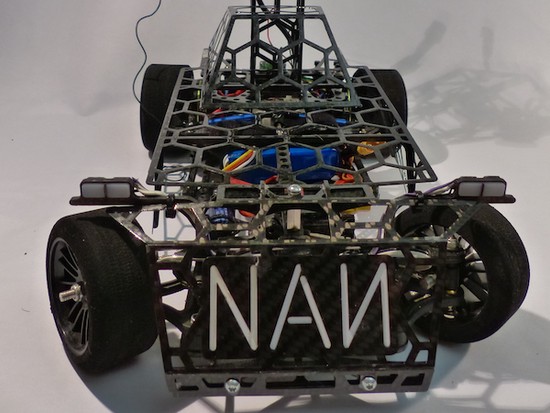
Carolo Cup 2018
competition vehicle for carolo cup 2018 by Team NAN
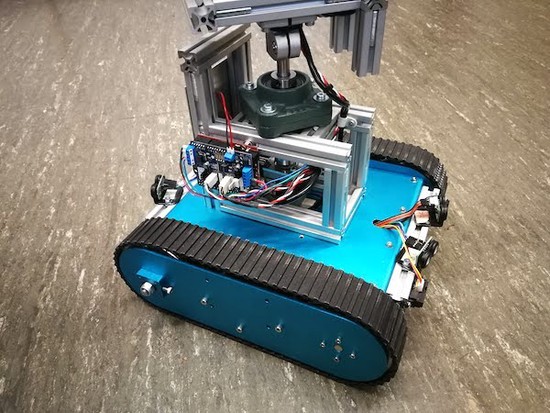
furniture mover
Lifting and moving chairs and blackboards to clean up our laboratories
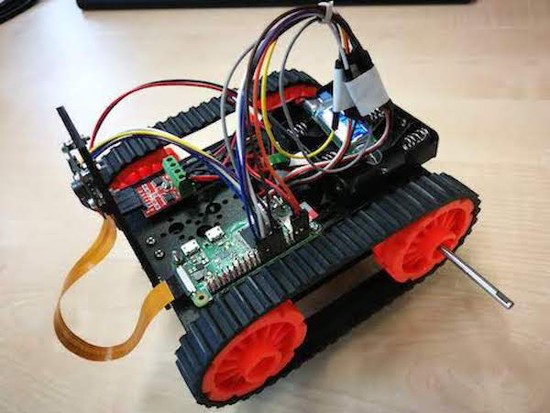
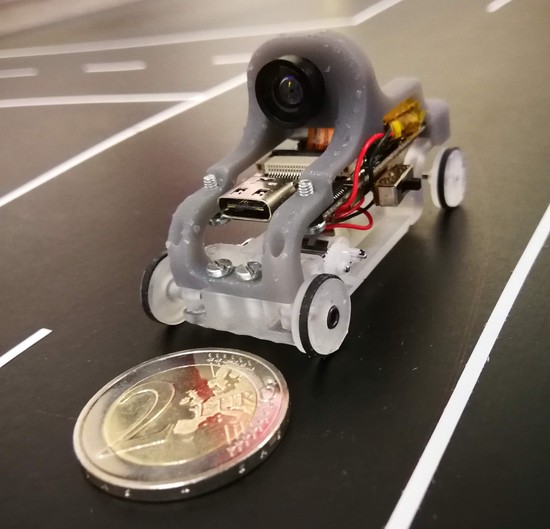
Miniature Car
RPi Zero W processor based autonomous vehicle using image data from micro cam for navigation

Campus Bot
Human assistance robot for outdoors and indoors

Scitos
Human assistance robot with 5 dof arm

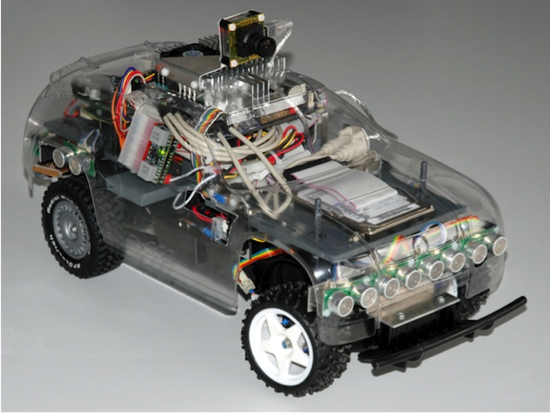
Carolo Cup 2008-2012
Competition vehicle for carolo cup and algorithm development 2008 - 2012
Carolo-Cup 2006
competition vehicle for carolo cup

Conversation Bot
research platform for wireless and visual communication between bots for development of decentralized swarm algorithms


Human Assistance Robot
ROS based human assistance robot

intelliTruck
combustion motor vehicle for outdoor autonomous driving and testing of control of vehicle dynamics

Red Truck
Model truck for autonomous driving based on laser scanner and IF sensors
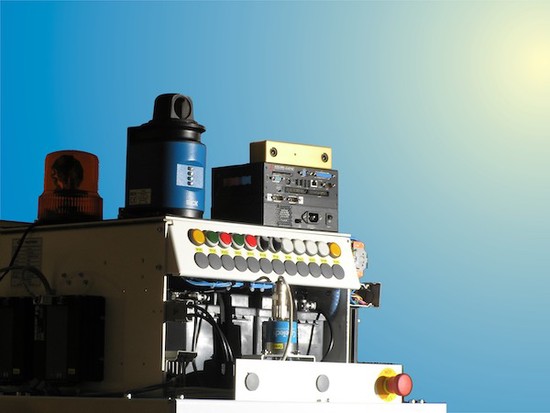
Industrial Vehicle
autonomous industrial vehicle for research on algorithms, control, industrial bus systems and sensor data integration